機械式立体駐車場用伸縮歯搬送ロボット:2種類の異なる設備の比較分析
立体駐車場の中核部品である伸縮歯搬送ロボットについて、2種類の構造を比較分析し、それぞれの特長と適用シーンを解説。今後のスマート駐車システムにおける進化と省エネ・自動化技術の方向性を紹介します。
前書き
都市の土地資源がますます逼迫する中、スマート機械式立体駐車場は商業エリア、住宅団地、公共交通機関のハブにおいて駐車スペースを拡張するための核となるソリューションとなっています。そして、車両搬送装置は立体駐車場の中核となる実行ユニットであり、その動作安定性、入出庫効率、適合性、安全性は、駐車場全体の運用能力と使用体験を直接左右します。
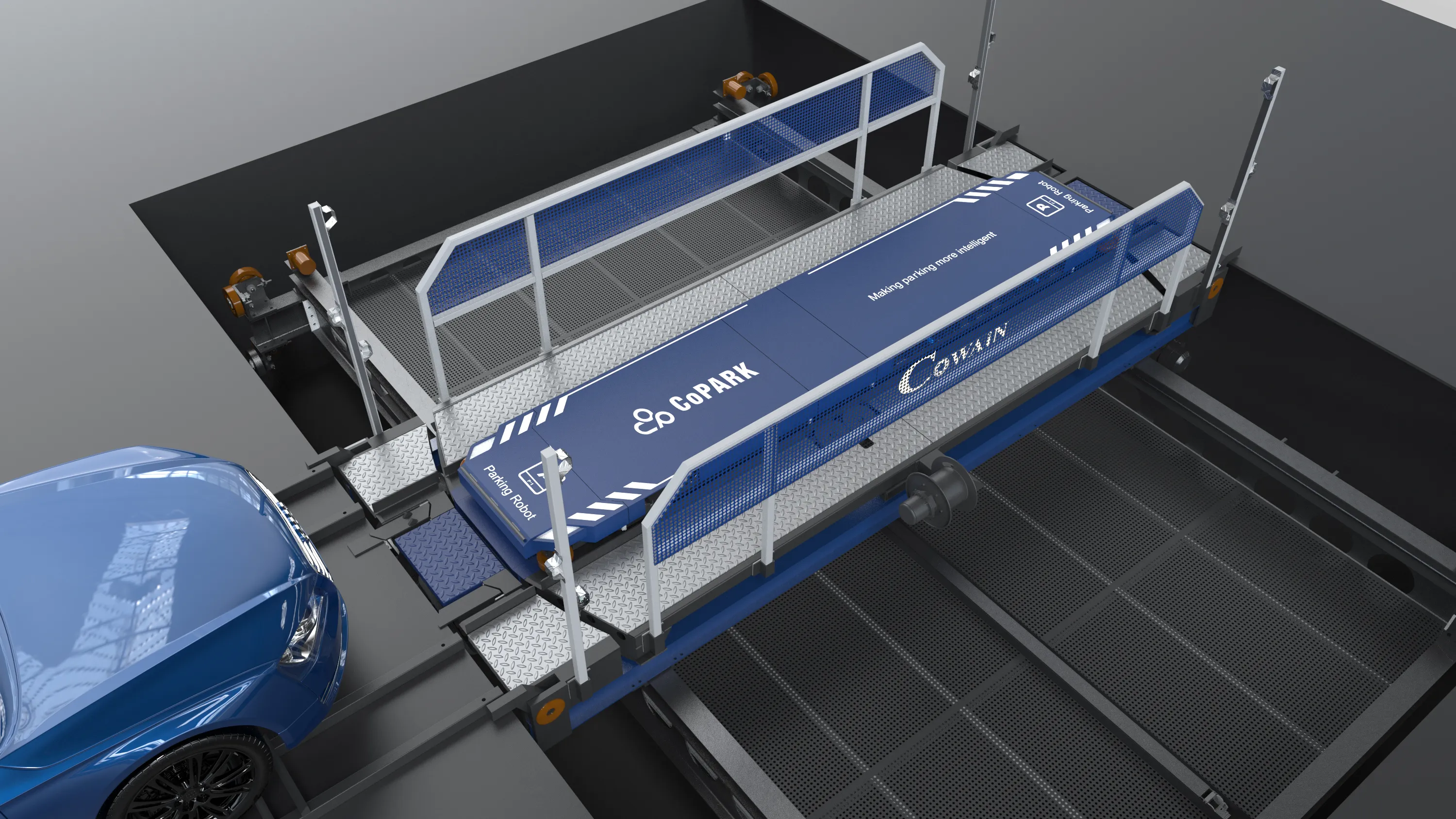
本稿で紹介する機械式立体駐車場伸縮歯搬送機は、各種スマート立体駐車場や平面移動駐車システム向けに開発された専用の車両搬送装置であり、従来の台車板搬送方式を排除し、台板のない伸縮櫛歯受け渡し技術を採用しています。これにより、車両の水平移動、昇降連携、駐車位置への精密な入出庫といった中核動作を効率的に実行できます。以下では、装置の全使用シナリオに基づき、その精密な電気設計の詳細を深く掘り下げ、製品の実用価値と技術的優位性を多角的に解説します。
従来の搬送方式と比較して、この伸縮歯搬送機の中核的な利点は、高い適応性、高い安定性、高い安全性の3つの側面に集中しています。製品は軽量でコンパクトな構造設計を採用し、異なるホイールベースや最低地上高を持つ一般車両に適合可能であり、従来の装置における車種制限を打破します。成熟した電気制御システムに依存し、低速での安定した起動・停止、高速での安定した搬送を実現し、駐車場の入出庫効率を大幅に向上させます。さらに、完全な電気安全保護メカニズムを搭載し、駐車場の湿気、ほこり、長時間連続運転といった過酷な環境に適応可能です。同時に、モジュール化された電気レイアウト設計により、装置の故障確率と後のメンテナンス難易度を大幅に低減しています。
現在使用されている伸縮歯搬送機は、その駆動方式により2種類に分類できます。一つは普通モーター駆動、もう一つはサーボモーター駆動です。動作原理に違いはありませんが、伝動設計および電気制御設計においては大きな違いがあります。

サーボ伸縮歯

三相モーター伸縮歯
上の図からわかるように、装置構造も電気レイアウトもまったく異なります。以下では、電気的な観点から両者の違いを詳細に分析し、特にサーボ制御搬送機の電気設計における注意点を重点的に説明します。
電気設計の詳細な解説
一、検出原理
両搬送機の検出原理は基本的に同じですが、機械構造設計の違いにより、検出方法に大きな差があります。
1-位置センサ設計方法

両搬送機の位置センサは、一方が磁気スイッチ、もう一方が鏡面反射スイッチを採用しています。
どちらの位置決め方法も、センサが位置決めブロックを検出して位置決めを行います。
2-伸縮歯収納センサ検出

三相モーターボードの前方および後方の伸縮歯収納スイッチ

サーボモーターボードの前方および後方の伸縮歯収納完了センサ
伸縮歯の収納検出方法は同じで、いずれも櫛歯フレーム自体の位置を検出してスイッチを作動させます。
3-伸縮歯伸長センサ検出

サーボモーターボードの前方および後方の伸縮歯伸長スイッチ

三相モーターボードの前方および後方の伸縮歯伸長完了
両装置の伸長完了検出方法は同じで、原理は伸縮フラップが車輪に接触した後、センサがトリガー信号を検出するというものです。
4-昇降上下位置検出

両装置の昇降位置検出方法は基本的に同じで、スイッチが固定されており、昇降が所定の位置に到達したことを検出して昇降の完了を判定します。
二、電動制御システム
1-電動制御ハードウェアシステム設計
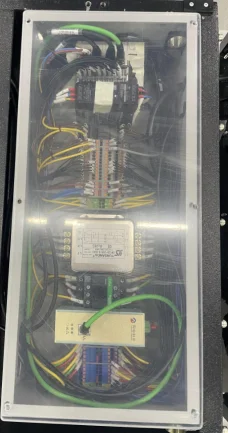
サーボ装置は分散型モジュール化電気アーキテクチャを採用しており、全体の制御システムはメインPLCコントローラ、サーボ駆動モジュール、センサ検出モジュール、伸縮実行モジュール、通信インタラクションモジュールの5つの主要ユニットで構成され、各モジュールは独立して動作し、連携して機能します。モジュール化設計の利点は顕著で、一方で回路配線が整然とし、ライン区分が明確で、強電と弱電が分離して配置されるため、ラインの相互干渉を効果的に回避し、短絡や漏電の故障確率を低減します。同時に、標準化された電気インターフェース設計により、市場の主流立体駐車場制御システムに完全に適合し、互換性が非常に高くなっています。

防塵透明カバー設計により、カバーを開けずに内部を確認でき、点検の利便性を最大限に高めています。制御ボックスと装置固定部の間には緩衝パッドが設けられており、装置稼働時の振動の大部分を緩衝パッドが吸収します。また、すべての端子台はスプリング圧着方式を採用しており、装置の振動による配線の緩みを防止します。
搬送機には完全な制御システムが搭載されているため、サーボ搬送機は標準品として存在でき、三相電源を供給するだけでよく、その他は無線通信を介して動作制御を実現できます。
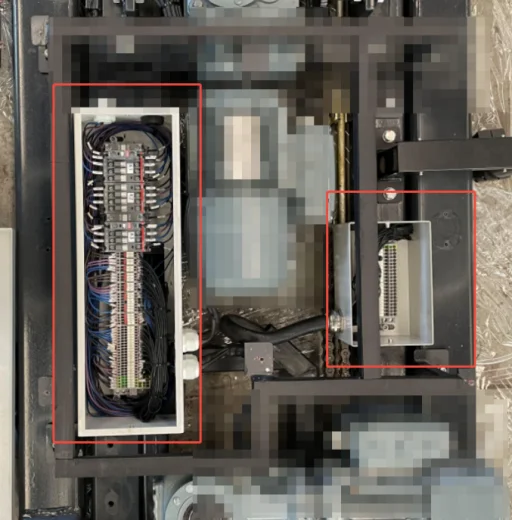
三相モーターボードの搬送機内の電装箱にはコンタクタと端子台のみが配置されています。スペースの制約により、制御システムを搬送機内部に統合できないため、装置の信号と制御を外部に出力して制御する必要があります。そのため、この搬送機には2組のケーブルを接続する必要があります。1組はモーター出力を制御する強電システム用、もう1組は搬送機のすべての制御信号を収集するケーブルです。2組のケーブルは芯線数が多く、さらに外部で2組のスプリングケーブルリールによるケーブル収納制御が必要です。総合的なコスト制御と装置の安定性の観点から、サーボバージョンに劣ります。
2-電気制御システムの設計
装置は高精度のインテリジェント論理制御回路を搭載し、PLCコア制御システムに依存し、サーボ駆動クローズドループ制御アルゴリズムと組み合わせることで、走行、伸縮、位置合わせ、受け渡しの全工程を精密に制御します。制御システムには内蔵の自己適応論理が組み込まれており、車両重量、ホイールベース、駐車位置のずれに応じて、伸縮歯の伸縮ストロークと走行軌跡を自動的に微調整し、ずれのない精密な車両受け渡しを実現します。同時に、回路には故障自己診断とインテリジェントフィードバック機能が統合されており、装置の稼働中にライン状態、センサデータ、モーターの動作状況をリアルタイムで検出し、異常が発生した場合は直ちに音響光警報を発報し、故障コードを記録し、同期して駐車場中央制御システムにアップロードするため、保守担当者が迅速に故障を特定できます。さらに、自動起動停止、連動昇降、インテリジェントスケジューリングなどの機能をサポートし、複数装置の連携作業に適合可能で、駐車場全体の入出庫効率を大幅に向上させます。
サーボ制御システムと比較して、従来の三相モーター制御はインバータに依存しています。インバータ制御は精密な位置決めの実現においてサーボ制御システムに遠く及ばず、モーターの応答速度も明らかに異なります。この2つの主要な違いにより、入出庫速度に明確な差が生じ、サーボシステムは三相モーターシステムよりも30%高速です。
しかし、従来の三相モーターにも利点がないわけではありません。普通モーターを採用しているため、環境に対する要求が低く、高温多湿や振動環境でも安定した性能を発揮します。また、通信に依存して制御することがないため、通信速度や通信障害による装置の動作遅延や制御不能の可能性を排除できます。搬送機は通常、横移動台車と組み合わせて使用され、1つのPLCで横移動台車と搬送機を同時に制御するため、内部データのやり取りの観点から、よりタイムリーで安定し、制御可能です。
結びのまとめ
以上が、伸縮歯搬送機の2種類の異なる構造に関する分析と比較です。立体駐車場の中核部品として、両搬送機にはそれぞれ長所と短所があり、プロジェクトごとに適切なものを選択する必要があります。今後、スマート駐車業界の継続的な進化に伴い、製品は電気インテリジェント制御と省エネ技術を最適化し続け、よりインテリジェントで集約化された駐車シナリオに適応し、都市の静的交通の質的向上と空間拡大を支える中核設備を提供していきます。
About the Author
